

عنوان پروژه : کنترل موقعیت و زاویه پاندول معکوس با استفاده از کنترلر فازی
قالب بندی : PDF, simulink
شرح مختصر : طراحی کنترل کننده و بررسی پایداری مدل پاندول معکوس بعلت غیر خطی بودن همیشه از موضوعات مطرح در کنترل بوده است.در این مقاله، یک کنترل کننده کلاسیک از نوع PD با روش تنظیم پارامتر زیگلر-نیکولز برای کنترل زاویه پاندول و یک کنترل کننده فازی از نوع ممدانی برای کنترل موقعیت گاری و زاویه پاندول طراحی شده اند که نتیجه ای که گرفته شده است این است که کنترل کلاسیک زمانی که زاویه کوچک باشد خطای حالت ماندگار صفر دارد ولی وقتی زاویه افزایش پیدا می کند خطای حالت ماندگار دادرد ولی کنترل کننده فازی با کم و زیاد شده زاویه خطای حالت ماندگار نخواهد داشت و سیستم غیر خطی را بدون خطی سازی کنترل می کند
فهرست :
مقدمه
روش
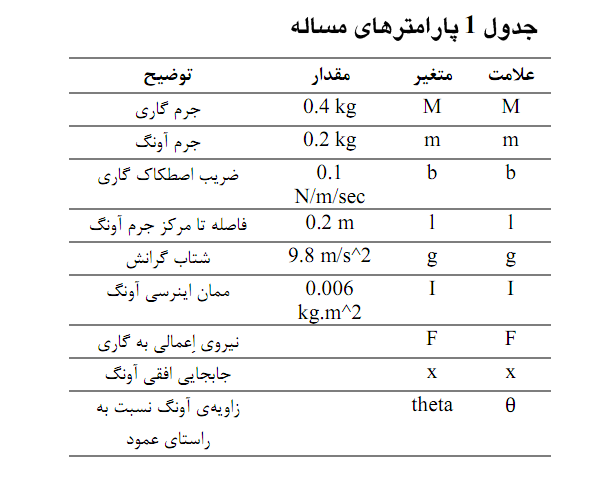
جدول پارامترهای مساله
معادلات دینامیکی و مدل سازی سیستم
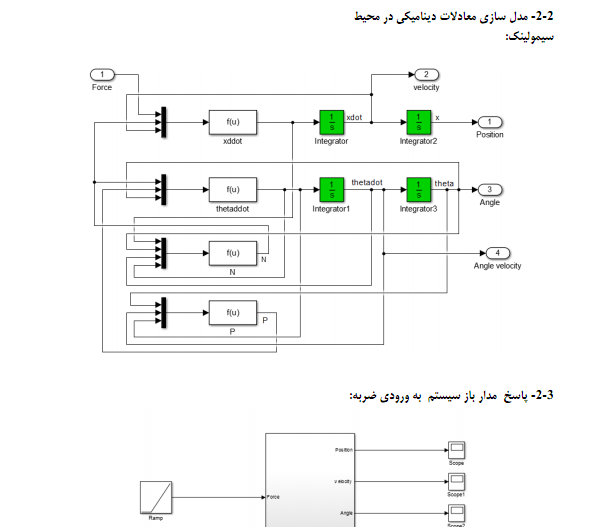
مدل سازی معادلات دینامیکی درمحیط سیمولینک
شبیه سازی در MATLAB
پاسخ مدار باز سیستم به ورودی ضربه
طراحی کنترلر کلاسیک PD برای کنترل زاویه پاندول
طراحی کنترل کننده فازی برای موقعیت گاری و زاویه پاندول
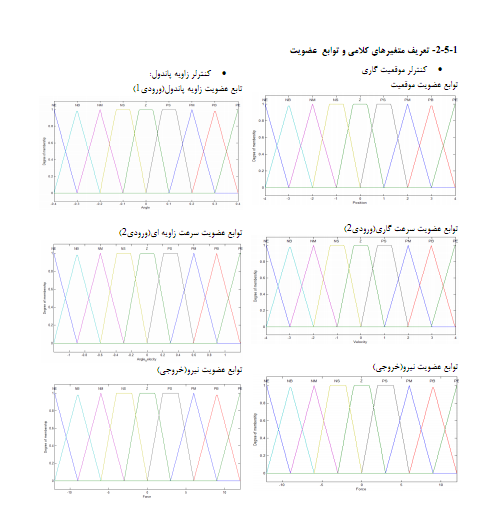
تعریف متغیرهای کلامی و توابع عضویت
قواعد فازی کنترلرها
شبیه سازی حلقه بسته سیستم و کنترلر فازی
نتایج
منابع و ماخذ
عکس هایی از متن:
مبلغ قابل پرداخت 7,000 تومان
برچسب های مهم
فایل اکسل افزایش حقوق کارگری در سال 1403 بر اساس اعلام وزارت کار به تفکیک حداقلی بگیر و سایر سطوح در این فایل اکسل فقط افزایش حقوق محاسبه شده است و بر اساس تغییر حقوق پایه قابل تغییر می باشد بیمه و مالیات لحاظ نشده است ...
این فایل در 36 اسلاید بصورت پاورپوینت جهت دانشجویان رشته میکروبیولوژی و ژنتیک تهیه و آماده ارائه در سمینار میباشد مایکو باکتریوم ها مایکوباکتریو توبر کلوزیس : ويژگي هاي رشد : واكنش در برابر عوامل فيزيكي و شيميايي : بيماريزايي : محتويات باسيل سل : آسيب شناسي الف) ... ...
اگر به یک وب سایت یا فروشگاه رایگان با فضای نامحدود و امکانات فراوان نیاز دارید بی درنگ دکمه زیر را کلیک نمایید.
ایجاد وب سایت یا






